
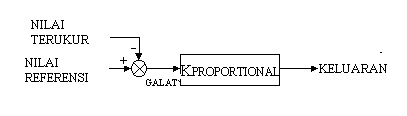
Maksud dari teknik kendali proporsional yakni jika terdapat parameter yang ingin dikendalikan tetap pada referensi, kendali proporsional akan menghasilkan sebuah keluaran kendali yang proporsional dengan galat referensi seperti ditunjukan dalam gambar 2.5.

Gambar 2.5. Kendali Proporsional
Dalam gambar 2.5 K merepresentasikan faktor gain dan subskrip mengindikasikan maksud dari gain tersebut.
Dalam aplikasi kendali proporsional untuk robot, jika diinginkan robot mengikuti dinding menggunakan sensor yang mengukur jarak robot ke dinding ( sebut saja sensor sonar), maka sistem kemudi robot harus berubah untuk mengembalikan robot ke jarak referensi. Misalkan jika robot berada 2 cm dari nilai referensi, maka robot harus membelokkan kemudi 4 derajad ke kiri. Jika berada 4 cm dari referensi maka robot harus membelokan kemudi 8 derajad ke kiri. Itulah yang dimaksud dengan kendali proporsional
Diagram blok dari operasi tersebut akan terlihat seperti gambar (2.6)

Gambar 2.6. Implementasi kendali P pada sistem navigasi robot mobile
Gambar 2.6. mengindikasikan bahwa jarak sonar aktual (s) dikurangi dengan jarak referensi (R) yakni jarak antara robot dengan dinding yang diinginkan. Ini menghasilkan sinyal galat (e) yang menunjukan jarak selisih dari referensi. Tanda + pada titik penjumlahan mengindikasikan bahwa sinyal referensi ditambahkan dan tanda – berarti jarak yang didapat sensor sonar dikurangkan untuk mendapatkan sinyal galat, sehingga seperti pada persamaan 2.14
e = R– s (2.14)
Blok gain steering (Ksteering) menggambarkan sebuah pelipatan untuk mendapatkan jumlah kemudi tiap cm galat. Keseluruhannya bisa dilihat pada persamaan (2.15):
θ= Ksteering * (R – s) (2.15)
Jika kita mempunyai sebuah robot dengan kemudi diferensial yang diinginkan berjalan sejajar dengan dinding pada jarak 24 cm dari dinding kanan. Robot dengan sensor jarak sonar atau inframerah secara kontinu akan memberikan informasi jarak robot dari dinding, jika robot diletakkan pada titik 12 cm lebih dekat dengan dinding. Persamaan 2.7 mengurangi jarak terukur dari dinding (12 cm) dari nilai referensi (24 cm) untuk mendapatan sebuah sinyal galat 12 cm. Yang kemudian dikalikan dengan gain (Ksterring) yang memberikan perintah kemudi sudut sebesar 24 derajat. Koreksi tersebut akan membuat robot berbelok ke kiri untuk mendapatkan nilai referensi 24 cm.
Perintah 24 derajad harus diterjemahkan menjadi perintah untuk dua kemudi motor. 24 derajad adalah sama dengan 0,42 radian dan dengan menggunakan jarak diantara dua sisi roda 10 cm, roda kanan harus begerak maju sebesar 0,42 x 10 = 4,2 cm untuk berbelok 24 derajat. Belokan seperti ini bisa dicapai dengan menambahkan separuh dari 4,2 cm ke perintah kendali kecepatan motor kanan dan mengurangkan separuhnya dari motor kiri. Belokan ini akan terjadi sangat cepat ( bergantung pada kecepatan motor men-drive roda) dan diansumsikan ini terjadi seketika.

Gambar 2.7. Robot mobile dengan kendali P
Robot sekarang kembali menuju jarak referensi dan seiring berjalan waktu, robot akan semakin dekat dan dekat. Karena galat menurun, perintah kemudi juga menurun secara proporsional dan robot akan mencapai jalurnya, galat steering akan menjadi nol dan robot akan di-drive sejajar terhadap dinding dan pada jarak yang benar. Hal tersebut digambarkan seperti pada gambar 2.7
GAIN
Variabel dalam persamaan proporsional ( setelah anda menghitung galat) hanyalah gain yakni Ksteering. Pada dasarnya, semakin besar nilai gainakan membuat robot merespon semakin besar pula terhadap sinyal galat yang kemudian menuju titik referensi menjadi semakin cepat, seperti halnya digambarkan pada gambar 2.8. Namun gain yang terlalu besar dapat membuat robot menjadi tidak stabil.
|
(a) |

|
(b) |

Gambar 2.8. Kendali P dengan gain (b) lebih besar daripada (a)
Bersambung..
Dikutip dari :
Perancangan Sistem Navigasi Wall Following
Tugas Akhir, Tedy Tri Saputro
Sekolah Tinggi Teknologi Nuklir – BATAN 2011
