
Oke, saya lanjutkan tulisan ini. Jadi yang belum membaca tulisan saya sebelumnya silahkan baca di sini
Jadi untuk mengoperasikan sebuah MOSFET, anda harus menerapkan tegangan dari mikrokontroler pada gate. Sehingga arus elektron dapat melewati dua kaki yang lain, menghubungkan motor (M) dalam jalur dengan satu kakinya, sehingga robot anda bisa bergerak. Pada skematik di tulisan saya sebelumnya, kita telah menandai A dan B. Itu adalah dua jalur kendali yang kita bisa terapkan tegangan logic padanya. Karena mempunya dua kaki dan hanya mengenali tegangan biner 1 dan 0 . Maka akan ada empat hal yang mungkin terjadi
A=0 B=0 : Tidak terjadi apa – apa, motor mati
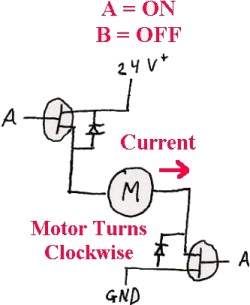
A=1 B=0 : Motor berputar searah jarum jam
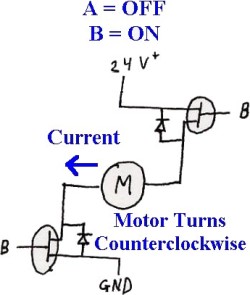
A=0 B=1 : Motor berputar berlawanan arah jarum jam
A=1 B=1 : Rangkaian akan memercikan bunga api
Berikut adalah penjelasan dari diagram logika H- bridge:
Bingung ya? Hehehe.. Oke, saya akan berbicara hal yang paling dasar dulu yakni bagaimana mengoperasikan MOSFET. Pada dasarnya yang kita perlukan adalah keluaran digital (dari mikrokontroler) pada gate MOSFET. Ketika keluaran digital menjadi ON, maka tegangan 5 V akan diterapkan pada gate, sehingga membuat MOSFET menyala. Tapi sebenarya lebih baik untuk meningkatkan tegangan 5 V ke nilai yang lebih tinggi. Kenapa?
Baik akan saya jelaskan. Tegangan gate sebenarnya mengendalikan hambatan internal dari MOSFET. Tegangan nol akan membuat hambatan terlalu tinggi untuknya bekerja. Namun tegangan yang sangat tinggi akan membuat hambatan menjadi kecil.Dan sebagaimana yang kita tahu hmbatan membuat hilangnya energi dalam bentuk panas. Ini berarti MOSFET anda bisa kepanasan dan mungkin terbakar. Jadi meskipun anda memang tidak perlu membesarkan nilai tegangan, saran saya, setidaknya kenakan heat sink untuk MOSFET tersebut
 Jadi apa yang harus dilakukan, jika kita ingin mengendalikan kecepatan motor, tidak sekedar switch on off saja? Ada yang namanya, PWM (Pulse width modulation). PWM adalah ketika kita mengirim sebuah gelombang persegi dengan frekuensi tertentu untuk mengendalikan MOSFET seperti yang ditunjukan pada gambar diatas. Pada dasarya kita membuat mikrokontroler untuk bergulir on dan off motor, namun kali ini dengan laju yang sangat tinggi.
Jadi apa yang harus dilakukan, jika kita ingin mengendalikan kecepatan motor, tidak sekedar switch on off saja? Ada yang namanya, PWM (Pulse width modulation). PWM adalah ketika kita mengirim sebuah gelombang persegi dengan frekuensi tertentu untuk mengendalikan MOSFET seperti yang ditunjukan pada gambar diatas. Pada dasarya kita membuat mikrokontroler untuk bergulir on dan off motor, namun kali ini dengan laju yang sangat tinggi.
Sehingga melalui induktansi, motor tidak berada pada kecepatan penuh, namun juga tidak benar – benar mati. Tapi berada di antara keduanya, yakni berjalan namun dengan kecepatan yang lebih lambat. Kita harus bereksperimen untuk mengetahui panjang gelombang yang tepat untuk periode on dan off, frekuensi mana yang baik untuk mengoptimasikan kendali kecepatan.
Pastikan MOSFET yang anda punya sudah terdapat proteksi dioda. Jika tidak, maka anda harus memasangnya sendiri pada rangkaian, guna mencegah arus balik dari motor DC. Juga jangan lupakan untuk menaruh sebuah kapasitor kecil di seberang yang mengarah ke motor anda untuk mengurangi noise elektronik sehingga motor dapat lebih awet. Jangan lupa pula untuk memperhatikan tentang regulasi daya robot untuk membantu merancang catu daya yang efektif untuk H-Bridge, akan dibahas pada tulisan saya berikutnya
Tamat
